啟動成功關鍵,隨時掌握商周.com最新資訊
提供第一手新聞解析、財經趨勢、專屬活動
啟動成功關鍵,隨時掌握商周.com最新資訊
提供第一手新聞解析、財經趨勢、專屬活動

本文由日經BP社 提供
提供
「終於到了能實現零事故社會的階段」—本田技術研究所代表董事社長山本芳春在臺上如此說道。本田宣佈,開發出了新型駕駛輔助系統「Honda SENSING」,將首先配備於2014年11月上市的新款高級轎車「Legend」(里程)上。

將配備於新款里程的新功能有六項,分別是(1)減輕碰撞制動功能、(2)道路偏離抑制功能、(3)減輕行人碰撞事故轉向功能、(4)帶交通擁堵追蹤功能的ACC(可適化巡航控制)功能、(5)標誌識別功能、(6)前車起步提醒功能。此外,還配備了兩個舊功能,即:車道保持輔助系統(LKAS)和誤起步抑制功能。
檢測作為交通弱者的行人
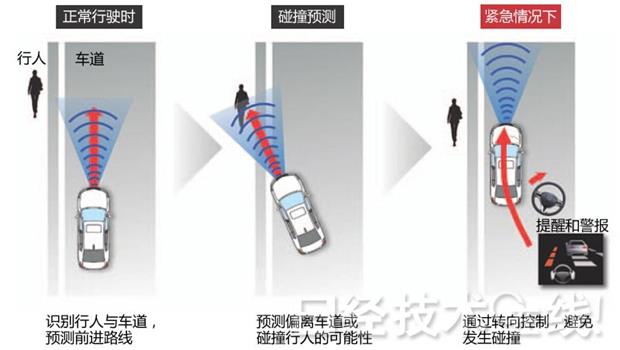
這些功能中,關鍵是(3)的能減輕行人碰撞事故的轉向功能。就是當預測到汽車偏離車道會碰撞行人時,操控方向盤以避免碰撞行人的功能(圖1)[註1]。據本田介紹,通過控制方向盤來避免碰撞行人的功能「在全球尚為首例」。
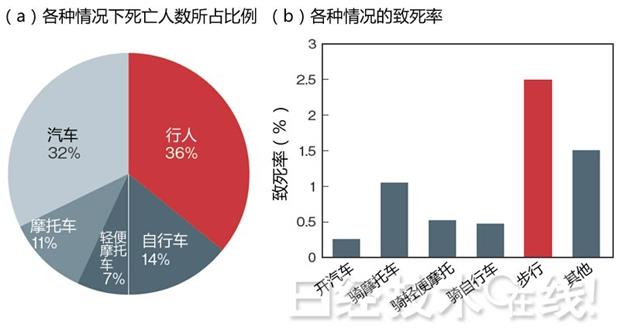
據日本警察廳報告,2013年日本交通死亡事故中,行人受傷害最多,佔到36%(圖2)。在死亡人數佔交通事故死傷人數的比例—「致死率」方面,步行中的死亡機率比開車過程中的死亡機率高9倍。
因此,要想實現「零事故社會」,必須減少行人碰撞事故。本田技術研究所負責開發Honda SENSING的林部直樹(汽車研發中心第12技術開發室室長)表示:「作為交通弱者的行人發生事故往往會死亡。因此需要避免事故的技術」。
但檢測行人的技術難度很大。使用攝影鏡頭,雖然能夠確定物體是人(行人),但檢測距離只有幾十m。在夜間及天氣惡劣時,識別精度還會下降。
還有使用毫米波雷達檢測行人的方法,汽車零件廠商等正紛紛配備行人識別功能。但從原理上講,毫米波雷達比攝影鏡頭更難識別物體。因為毫米波雷達根據反射波的時間差和強度等來推算距離。人的反射強度僅為金屬車輛的1/1000左右。因此,行人的反射波容易被其他物體的反射波遮擋,而難以區分。
識別精度提高到原來4倍
針對這些課題,本田「通過融合攝影鏡頭和毫米波雷達,將識別精度提高到了原系統的約4倍」林部指出。作為高級駕駛輔助系統(ADAS)使用的感測器,攝影鏡頭和毫米波雷達全都配備的車輛並不少。但大多「分工使用,用毫米波雷達檢測車輛,而用攝影鏡頭檢測行人和道路標線」。
這次,本田採用了綜合處理這兩種感測器數據的「感測器融合」方法(圖3)。林部:「這樣就可以從遠處準確檢測車輛及行人了,從而實現了更高的事故避免性能」。

減輕行人碰撞事故轉向功能具體按照如下流程避免行人碰撞事故。首先,利用嵌入水箱罩內的毫米波雷達檢測前方大約150m遠處的物體。然後,利用安裝在前擋風玻璃內側的彩色單眼攝影鏡頭確定檢測到的前方物體是行人還是車輛等[註2]。同時用單眼攝影鏡頭檢測道路標線,以預測前進路線。如果根據行人位置和前進路線等資訊,預測汽車偏離車道會撞上路邊的行人,就會控制方向盤。(記者:久米秀尚,《日經電子》)
[註1]在時速約10k~40km的範圍內啟動。
[註2]單眼攝影鏡頭上配備的CMOS圖像感測器約為120萬畫素。原來為30萬畫素左右。
科技最趨勢每日精選由日經BP社技術在線網站提供的最新、最專業科技技術報導。




























